
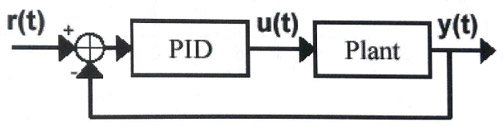
در نمایندگی زیمنس آنچه به عنوان PID کنترل ذکر می شود ، منظور یک سیستم کنترل حلقه بستـه است که پارامتر هـای P , I , D برای بدست آوردن بهترین پاسخ مورد نظر در آن تنظیم شده اند و در آن :
پارامتر P مخفف Proportional یا تناسبی است
پارامتر I مخفف Integral یا انتگرال گیر است
پارامتر D مخفف Derivative یا مشتق گیر است
در اتوماسیون زیمنس یک PID کنترلر ممکن است برخی یا همه ی این پارامتر ها را داشته باشد که این بستگی به کاربرد مورد نیاز دارد تا پاسخ سیستم کنترل بهینه باشد. بهترین پاسخ برای یک سیستم کنترلی آن است که :
ناپایدار نباشد ، یعنی مرتباً اختلاف مقدار مبنا و مقدار واقعی زیاد نشود.
نوسانی نباشد ، یعنی مرتباً حول نقطه ی مبنا کم و زیاد نشود.
کند نباشد ، یعنی در کوتاه ترین زمان ممکن به پایداری برسد.
Overshoot یا جهش زیاد نداشته باشد و منجر به ضربه زدن به خروجی (Actuator) نشود.
پارامتر P مخفف Proportional یا تناسبی است
پارامتر I مخفف Integral یا انتگرال گیر است
پارامتر D مخفف Derivative یا مشتق گیر است
در اتوماسیون زیمنس یک PID کنترلر ممکن است برخی یا همه ی این پارامتر ها را داشته باشد که این بستگی به کاربرد مورد نیاز دارد تا پاسخ سیستم کنترل بهینه باشد. بهترین پاسخ برای یک سیستم کنترلی آن است که :
ناپایدار نباشد ، یعنی مرتباً اختلاف مقدار مبنا و مقدار واقعی زیاد نشود.
نوسانی نباشد ، یعنی مرتباً حول نقطه ی مبنا کم و زیاد نشود.
کند نباشد ، یعنی در کوتاه ترین زمان ممکن به پایداری برسد.
Overshoot یا جهش زیاد نداشته باشد و منجر به ضربه زدن به خروجی (Actuator) نشود.